|
|
|
|
Навигация
Популярное
|
Публикации «Сигма-Тест» Классификация самолетов 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 [ 28 ] 29 30 31 32 33 34 35 36 37 38 39 40 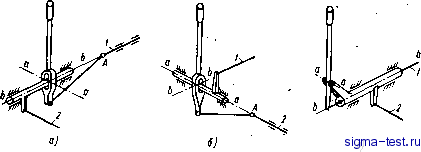 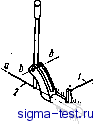 / v о £* управления при помощи ручки- 1-к органам продольного управлеш,я; 2 - к opraHWnol перечного управления 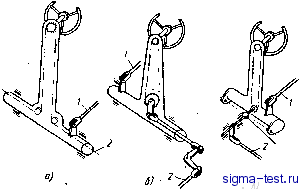 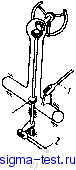 /ииВерсапьныи шарнир Рис. 10.2. Схемы постов штурвального управления; 1-к органам продольного управления; 2 - к органам поперечного управления 3) с осью вращения штурвальной колонки совмещается однаиз осей универсального шарнира (см. рис. 10.2, виг). Штурвальное управление обычно применяется на тяжелых неманевренных самолетах, так как здесь можно получить при больших шарнирных моментах меньшее усилие на штурвале при допустимом для таких самолетов времени отклонения элеронов. СХЕМЫ ПОСТОВ ножного УПРАВЛЕНИЯ Ножное управление по типу командного рычага можно разделить на три схемы: 1) рычажное управление с вращением рычагов педалей относительно вертикальной оси; 164 - Рнс. 10.3. Схемы постов ножного рычажного управления с вращением рычагов педалей относительно вертикальной оси -Г-, Крут у направления крут направления 2) рьиажное управление с качанием рычагов педалей относительно горизонтальной оси, перпендикулйрной плоскости симметрии самолета; 3) управление со скользящими педалями. Рычажное управление с вращением рычагов недалек относителыю вертикальной оси. Схема простейшего механизма такого управления показана на рис. 10.3, а. Большим недостатком этого механизма является поворот опорной поверхности педалей при повороте их рычага, что приводит к перекашиванию ступней. По этой причине такой механизм не получил распространения. Широко применяется параллелограммный механизм (рис. 10.3, б). В нем при повороте рычагов педали не перекашиваются, что позволяет выбрать наиболее удобное их положение относительно ног. Регулировка педалей под рост пилота производится путем их передвижения в требуемом направлении с последующей фиксацией. К недостаткам такого механизма следует отнести относительно большую его ширину, что необходимо для обеспечения требуемого хода ноги. Кроме того, при повороте рьйагов изменяется расстояние по ширине между педалями. Рычажное у1Ц>авление с качанием рычагов педалей относительно гори-зонталыюй оси. Ось вращения рычагов может располагаться как над педалями (рис. 10.4, а), так и под ними (рис. 10.4, о). Рычаги обеих педалей связаны тягами с рычагами, закрепленными на трубе, на которой расположен и рычаг, связанный с проводкой, идущей к рулю направления. Связь между рычагами педалей может осуществляться й при помощи троса (рис. 10.4, в). Здесь педали также регулируются под рост пилота. Преимуществомтаких схем управления является небольшая ширина и постоянное расстояние между плоскостями, в которых движутся педали. Схема, показанная на рис. 10.4, б, предпочтительнее, так как здесь рьиаги педалей крепятся на полу кабины. В схемах показанных на рис. 10,4, а не, для крепления рычагов педалей необходима установка специальных конструктивных элементов, что лрйводит к увеличению массы. Схемы с качанием рычагов педалей относительно горизонтальной оси получили широкое распространение на тяжелых самолетах из-за возможности дифференцировать ход педалей и увеличить их рабочий ход.   рупю направления К рулю направления ; в) к рулю направления  Рис. 10.4. Схемы постов ножного рычажного-управления с качанием рычагов педалей относительно горизонтальной оси Управление со скользящими педалями. В этой схеме (рис. 10.5) педали перемещаются по направляющим , связываются они тросовой проводкой. Конструкция обеспечивает регулировку педалей под рост пилота. Преимуществом этой схемы является поступательное перемещение педалей, небольшие габаритные размеры и повысоте, и по ширине. К недо-статкам-следует отнести большее, чем у других постов, трение и большую массу. ПРОВОДКА УПРАВЛЕНИЯ Проводка управления по типуделится на гибкую, жесткую и смешанную. Гибкая проводка управления. Она осуществляется двумя гибкими элементами - обычно тросами, связывающими командный рычаг с рулевой поверхностью. Из Этих двух тросов при перемещении командного рычага усилие на рулевую поверхность передает один растянутый трос. Тросовая проводка должна быть так проложена в самолете, чтобы при отклонении рычага исключалась возможность перетяжки одного троса и чрезмерного ослабления другого. Это достигается заменой рычагов секторами (рис. 10.6, б). При постановке обычных рычагов необходимо, чтобы угол между осью троса и осью рычага качалки в нейтральном положении равнялся 90 (рис. 10.6, в). . Изменение Направления троса производится при помощи роликов. Для уменьшения трения в управлении и износа троса угол обхвата ролика тросом желательно делать по возможности меньшим; угол обхвата более 90° не рекомендуется. Преимущества гибкой проводки следующие: ч 1) меньшая ? сравнении с жесткой проводкой масса; 2) конструктивная простота прокладки ее в самолете; 3) безопасность в отношении вибраций. Недостатками гибкой проводки являются:. 1) упругие люфты в проводке, что приводит к ухудшению чувствитель ности управления и снижению критической скорости рулевого флаттера; 2) возможность провисания или перенатяжения тросовпри деформации конструкции самолета в полете, при этом первое приводит к возникнове--нию люфтов и, связанных с ним недостатков, а второе - к увеличению трения в управлении; 3) большее, чем при жесткой проводке, трение; 4) необходимость частой регулировки из-за вытяжения тросов; 5) невозможность создания переменного передаточного числа по углу отклонения командного рычага (невозможность дифференциального управления). Трос t Сектор 7- К рут направления 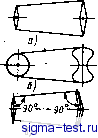 Рие. 10.5. Схема поста ножного управления со скользящими педалями Рис. 10.6 Схемы Прокладки тросовой проводки: а - неправильно; б, в - правильно  Рис. 10.7. Типы качалок Рис. 10.8. Схема расстановки роликовых направляющих Жесткая проводка управления. Она выполняется из жестких тяг, связыва-юидих командный рычаге рулевой поверхностью. Тяги изготовляются преимущественно из тонкостенных труб из алюминиевого сплава. Для коротких, сильно нагруженных тяг ча,сто применяются стальные трубы. Работают тяги на растяжение И сжатие. Длина отдельной тяги определяется условиями компоновки и желанием получить наименьшую массу проводки при передаче расчетных усилий. Для подвески тяг служат качалки (рис. 10.7); С помощью качалок можно изменить направление движения тяг, изменить величину передаваемого усилия. Есть качалки, служащие лишь для поддержания тяг. Дл.я поддержания длинных тяг, совершающих движение только вдоль своей оси, применяются роликовые направляющие. Чтобы исключить возможность заедания проводки при деформащ1и конструкции в полете, желательно больше двух направляющих на однойтяги не ставить. При этом угол между осями соседних тяг должен быть равным или очень близким к нулю, чтобы исключить появление значительных поперечных сил; вызывающих изгиб тяг, увеличение трения в проводке и, как следствие этого, быстрый износ направляющих и тяг. На рис. 10.8 показана схема правильной расстановки роликовьтх направляющих. Преимуществамд$,жесткой-проводки управления являются: 1) более высокая жесткость; 2) меньшее, чем у гибкой проводки. Трение; 3) возможность обеспечения дифференциального управления; 4) простота в эксплуатации, так как жесткая проводка не требует час-TOHjjerynHpoBKH. Но жесткая проводка имеет и ряд недостатков: 1) большая масса; 2) возможность возникновения резонансных колебаний; 3) большая конструктивная сложность деталей проводки; 4) трудности прокладки ее по самолету. Жесткая проводка управления нашла широкое применение на современных скоростных самолетах. Смешанная проводка управления. Часть проводки делается гибкой, а часть - жесткой. Применение смешанной проводки диктуется соображениями удобства при прокладке, желанием получить возможно меньшую массу и меньшее трение при обеспечении требуемой живучести, высокой чувствительности управления, простоты в эксплуатации. § 3. ОСОБЫЕ МЕХАНИЗМЫ УПРАВЛЕНИЯ ДИФФЕРЕНЦИАЛЬНОЕ УПРАВЛЕНИЕ Управление, при котором отклонение командного рычага на один и тот же угол в разные стороны вызывает отклонение рулевой поверхности на неодинаковые углы, носит название дифференциального. Простейшим элементом дифференциального управления является двуплечий рычаг, к которому тяги подходят под разными углами (рис. 10.9). Отклонение двуплечевого рычага вправо или влево на угол 3 приводит к перемещениям тяги 1 на одинаковые расстояния в разные стороны (Шо -= По) и тяги-2 на неодинаковые расстояния (ш > п). Степень дифференциальности определяется в этом случае отношением m / п. Величины тип связаны с углами а и j3 и радиусом рычага R следующими завцримостями: m = R sin а - R sin (а-j3 ); п = R sin (а + j3) - R sin а. Величина же степени дифференциальности зависит лишь от углов а и/?: m 5in а - sin (а - Р) sin (о + 0) - sin а Отсюда видно, что степень дифференциальности при одинаковых а растет с увеличением угла , а при одном и том же - с увеличением угла а. На рис. 10.10 показаны различные типы двуплечих рычагов, применяемых при дифференциальном управлении. Эти рычаги, обеспечивая диффе-ренциальность управления, одновременно позволяют и изменить направление движения тяг. Одна из *яг в нейтральном положении руля подходит к рычагу под углом в 90**, другая - под острым или тупым. Степень дифференциальности, обеспечиваемая такими рычагами, при наиболее употребительных углах а и /3 обычно не превышает 1,5. Для повышения степени дифференциальности всей системы управления в ней устанавливается несколько таких рычагов. Можно повысить степень дифференциальности и иа одном рычаге, заменив прямой угол между плечом и одной из тяг тупым или острым (рис. 10.1 ]). НЕЛИНЕЙНЫЕ МЕХАНИЗМЫ У скоростного самолета, геометрические размеры рулей которого подбираются из условий обеспечения необходимой эффективности при полете на большой высоте с максимальной скоростью, наблюдается повышенная эффективность органов управления на больших дозвуковых скоростях у земли. Для изменения режима полета такого самолета у земли на большой скорости необходимо очень малое отклонение рулевых поверхностей, а следовательно, и очень малое откло- Рис. 10.9. Двуплечий рычаг дифференциалы!ого управления 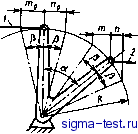 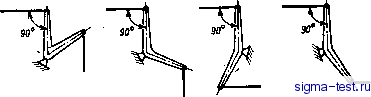 Рис. 10.10; Типы двуплечих рычагов, применяемых при дифференциальном управлении 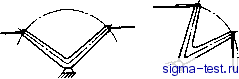 Рис. 10.11. Способы повышения степени дифферейци-алы ости Рис 1012. Характеристика механизма нелинейной передачи: / - прямая передача; 2 - нелинейная передача 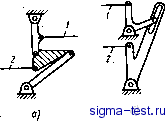 Шестерня Кривошип 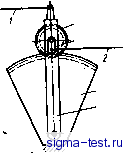 Сектор качаш в} 7Ш, Рис. 10.13. Схемы нелинейных механизмов: а - с жестким треугольником; б - кулисный; в - шестеренчатый; / - от командного рычага; 2 - к рулю нение командных рычагов Даже небольшая оишбка в отклонении последних вы.зьшает здесь значительное изменение режима полета, что создает большие трудности в управлении и, кроме того, может привести к возникновению недопустимых перегрузок. Для устранения этого недостатка в системах управления стали применять механизмы нелинейной передачи, обеспечивающие увеличение углов отклонения командных рычагов в начале отклонения рулевых поверхностей. На рис. 10.12 приведена характеристика такой нелинейной передачи, показывающая зависимость угла отклонения руля 5р от угла отклонения командного рычага р. Из характеристики видно, что для отклонения руля на какой-то угол от нейтрального положения требуется значительно больший угол отклонения командного рычага, чем при отклонении руля на этот же угол вблизи его крайних положений.
|
|
© 2010 www.sigma-test.ru Санкт-Петербург: +7 (812) 265-34-48, +7 (812) 567-94-10
Разработка и поддержка сайта: +7(495)795-01-39 после гудка 148651, sigma-test.ru(my_love_dog)r01-service.ru Копирование текстовой и графической информации разрешено при наличии ссылки. |


