|
|
|
|
Навигация
Популярное
|
Публикации «Сигма-Тест» Классификация самолетов 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 [ 29 ] 30 31 32 33 34 35 36 37 38 39 40 На рис. 10,13 показано несколько схем нелинейных механизмов. На современных самолетах нелинейные механизмы нашли широкое применение в системах управления злеронами и рулями высоты и особенно в системах управления пельноуправляемым горизонтальным оперением. МЕХАНИЗМЫ ИЗМЕНЕНИЯ ПЕРЕДАТОЧНЫХ ОТНОШЕНИЙ Повышение эффективности органов управления при большой скорости полета требует понижения чувствительности самолета к случайным небольшим перемещениям командного рычага. Добиться этого можно изменением передаточного отношения от командного рычага к рулю. При достижении заданной .скорости полета включается механизм, уменьшающий передатрч-ное отношение. Когда скорость полета станет меньше этой заданной величины, передаточное отношение увеличивается. Переключение механизма может производиться пилотом или автоматом, установленным в системе управления. На рис. 10.14 показана схема механизма изменения передаточного отношения, установленного на ручке управления. В зависимости от скорости полета пилот, переводя тумблер в.соответствующее положение, с помощью электродвигателя, вращающего ходовой винт, изменяет длину выходного эвена ручки и обеспечивает тем самым требуемое передаточное отношение. В случае отказа электродвигателя изменение передаточного отношения производится с помощью ручного привода ходового винта. На рис. 10.15 показана схема механизма изменения передаточного отношения, установленного в проводке управления. Изменение с помощью электродвигателя наклона направляющей приводит к изменению передаточного отношения. На рис. 10.16 показана схема механизма, установленного в проводке управления, обеспечивающего изменение передаточного отношения путем изменения длины выходного эвена качалки. Рис. 10.14. Схема механизма изменения передаточного отношения, установленного на ручке: I - тумблер; 2 - электродвигатель с редуктором; 3 -ходовой винт; 4 - выходное звено ручки; 5 - ручной привод ходового винта 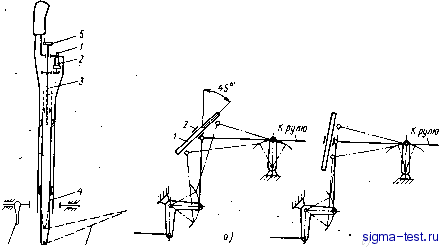 К эпероиап Л рупю бысоты Рис. 10.15. Схема механизма изменения передаточного отношегтя, установленного в проводке управления-- положение механизма при коэффициенте передачи п= - 1; б - положение механизма при п>1; / - направляющая; 2 - ползун От пилота Выходное звено К рулю Рис. lfl.16. Схема механизма изменения передаточного отношения, установленного на качалке 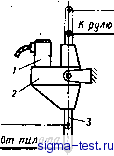 Рис. 10.17. Схема механизма автомата изменения передаточного отношения: / - электоодвигатель; 2 - корпус ме-хашэма; 3 - перемещающийся двуплечий рычаг В систшах управления с стоматическим изменением передаточных отношений широкое применение нашли механизмы, обеспечивающие одновременное изменение длин входного и выходного звеньев. Схеа такого механизма показана на рис. 10.17. § 4. ОСОБЫЕ СХЕМЫ УПРАВЛЕНИЯ УПРАВЛЕНИЕ ЭЛЕРОНАМИ-ЗАКРЫЛКАМИ В качестве одного из средств повышения Су зх механизированного крыла могут быть использованы и элероны. При включении механизации одновременно с ней Отклоняются вниз и оба элерона,что приводит к появлению на крыльях дополнительной подьемной силы. Если теперь отклонить вправо или влево ручку или штурвал, то один из элеронов отклонится вверх, а другой - вниз, что вызовет крен самолета. Такие рулевые поверхности носят название элеронов-закрылков, или зависающих элеронов. На некоторых самолетах для повьпиенйя эффективности поперечного управления отдельные секции закрьшков могут использоваться и как элероны. Такие закрылки-элероны носят название флаперонов. Существуют различные схемы управления элеронами-закрылками. Одна из них приведена на рис. 10.18. , Командный рычаг управления элеронами соединен тягами 1 с двуплечим рычагом 3, на втором плече которого установлен двухплечий рычаг 4, связанный тягой 5 с элероном. К другому плечу рычага 4 подходит тяга 2, связанная с механизмом управления эакрьшками. При управлении элеронами-закрылками как элеронами отклонение ручки (штурвала) вызывает поворот рычага 3, а следовательно, и перемещение установленного на нем рычага 4, что приводит к передвижению тяги 5 и к отклонению элерона-эакрьшка. При включении механизма управления закрылками тяга 2 передвигается в направлении, указанном стрелкой. Происходящий при этом поворот рычага 4 вызывает отклонение элерона-закрылка вниз, т. е последний работает в этом случае как закрылок. Рис. 10.18. CxeMi управления злеронами-закрылками Элерон-закрылок Закрылок 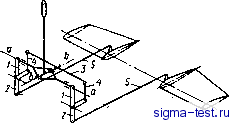 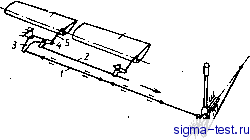 Рис. 10.19. Схема управления элеронами и дифференциалы{ым целыю-управляемым горизонталы1Ым.оперением с механизмом, совмещенным с постом ручного управления УПРАВЛЕНИЕ ЭЛЕВОНАМИ И ДИФФЕРЕНЦИАЛЬНЫМ ЦЕЛЬНОУПРАВЛЯЕМЫМ ГОРИЗОНТАЛЬНЫМ ОПЕРЕНИЕМ Элевоны, совмещающие в себе элероны и рули высоты, и дифференциальное цельноуправляемое горизонтальное оперение, выполняющее функции органов продольного и поперечного управлений, управляются от командного рычага ручного управления. При отклонении ручки или штурвальной колонки на себя или от себя механизм управления должен обеспечить одновременное отклонение обоих элевонов или обеих половин оперения вверх или вниз, а при отклонении ручки или штурвала вправо или влево - отклонение элевонов или половин оперения в разные стороны. . Существуют различные типы механизмов, обеспечивающих такое управление. Один из таких механизмов, совмещенных с постом ручного управления, показан на рис. 10.19: В этом механизме к оси а -а крепления ручки жестко присоединены рычаги 1, на которых шарнирно крепятся двуплечие рь1чаги 2. У каждого рычага 2 к одному из плеч присоединяется тяга 5 управления рулевой поверхностью. На оси а-а закреплена ось Ь-b вращения ручки в стороны. С осью Ь-b жестко связан рычаг 5, концы которого при помощи тяг 4 соединены с двуплечими рычагами 2. При отклонении ручки на себя или от себя происходит вращение всего механизма от-носительно ocHd - d, что вызывает отклонение рычагов 2 в одну сторону и, следовательно, одновременное отклонение вверх или вниз рулевых поверхностей. При отклонении ручки вправо или влево происходит поворот жестко связанного с ней рьмага 3 относительно оси b - Ь, что приводит к отклонению двуплечих рычагов 2, а следовательно, и рулевых поверхностей в разные стороны. На рис. 10.20 показан механизм, включенный в проводку управления. При отклонении ручки на себя и от себя поворачивается рычаг-рамка 1 относительно оси с-с, вызывая одновременное отклонение рулевых поверхностей вверх или вниз. Отклонение ручки вправо или влево вызывает поворот оси 2 и жестко связанного с ней рычага 3. С помощью тяги 4 отклонение рычага 3 приводит к вращению трехплечего рычага 5 относительно оси d-d, ,что вызывает отклонение рулевых поверхностей в разные стороны. 172 Рис 10.20. Схема управления зпевоимин и дифференциальным цельноуправляемым горизонтальным оперением с механизмом, включенным в проводку 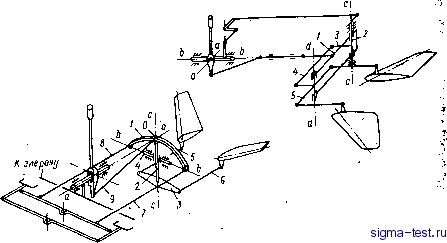 Рис. 10.21. Схема управления V-образным оперением УПРАВЛЕНИЕ У-ОБРАЗНЫМ ОПЕРЕНИЕМ Рули Уюбразного оперения выполняют функции руля высоты и руля направления и управляются поэтому от командных рычагов ножного и ручного управления. Движение педалей вцзьшает отклонение рулей в разные стороны, а движение ручки или штурвальной колонки на себя или от себя вызывает одновременное отклонение рулей вверх или вниз. При этом отклонения как руля высоты, так и руля направления должны быть независимыми. Механизм управления должен удовлетворять также и предъявляемому к ручному управлению требованию независимости отклонения рулей высоты и элеронов. На рис. 10.21 показана схема управления Уюбразным оперением. Отклонение ручки вправо или влево при управлении элеронами не вызывает ожлонения рулей, так как точка О располагается на продолжении оси а-а. При повороте педалей перемещение тяги 7к8вызывает вращение кривого рычага 1 относительно оси с-с трубы 2, жестко с ним соединенной. Труба 2 вращается в трубе, к которой крепятся цапфы 4. Вращение трубы 2 вызывает поворот жестко соединенного с ней рычага 3, что приводит к перемещению тяг 5 и б в разные стороны, а следовательно, и к ожлонению в разные стороны рулей. При отклонении ручки от себя нли на себя перемещение тяги 9 вызывает поворот кривого двуплечевого рычага 1, трубы 2 и рычага 5 относительно оси b-b, что приводит к перемещению тяг 5 и б в одну сторону и, следовательно, к одновременному отклонению рулей вверх или дниз. Независимость отклонения их как руля высоты и руля направления обеспечивается присоединением тяг 7 и 5 к рьгаагу 1 в точках, лежадих на оси b-b. § 5. КОНСТРУКЦИЯ ЭЛЕМЕНТОВ УПРАВЛЕНИЯ Л КОНСТРУКЦИЯ КОМАНДНЫХ РЫЧАГОВ РУЧНОГО УПРАВЛЕНИЯ Ручка. Она представляет собой неравноплечий рычаг, устанавливаемый вертикально в кабине пилота. Ручка крепится шарнирно к кронштейну трубчатой оси, установленной в опорах на шарикоподшипниках. Конструк- Рис. 10.22. Ручка управлешя- 5 -S.* ~ Р - вснование; корпус кнопки; :> - рычаг торможения колес; 6 - цилиндр; 7 - стопор ручки 8 - трос 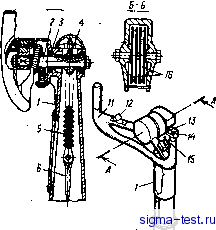 Ось качания штурВальной колоти 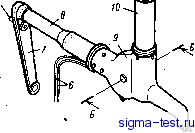 Рис. 10.23. Штурвалыия колонка: I - головка; 2 - вал; 3 - шарикоподшипник; 4 - звездочка; 5 - пластинчатая цепь; 6 - тросы управления элеронами; 7 -рычаг управления рулем высоты; 8 - труба; Р - основание; /О - труба; /7 - штурвал; 7Z../J - кнопки; /6 - ролики тивно ручки вьтолняются различно. Как правило, ручка состоит из трех основных частей: рукоятки, трубы и основания, на котором имеется узел крепления ручки. На рукоятке монтируются кнопки управления отдельными агрегатами - тормозами, тормозными щитками, элекгроспуском вооружения т. п. На рис. 10.22 показана ручка управления. Штурвальная колонка. Она состоит из головки со штурвалом, верти кальной трубы и основания. В головку запрессовываются два шарикоподшипника, в которых враща-ется-вал. На конце вала закрепляется штурвал. Сверху обод штурвала имеет вырез, вдо облегчает наблюдение за установленными на приборной доске указателями. На штурвале монтируются кнопки управления отдельными 74 агрегатами. На валу внутри головки при помощи шпонки закрепляется звездочка. Надетая на нее пластинчатая цепь и тросы, перекинутые через установленные внутри основания ролики, передают усилия со штурвала на проводку, идущую к органам поперечного управления (см. рис. 10;2,fl). В других конструкщшх пластинчатая цепь идет на вторую звездочку, закрепленную на валике внутри основания. На этом валике в одном случае крепится рычаг, соединенный тягой (ось ее совпает с осью вращения колонки) с проводкой, идущей к органам поперечного управления (см. рис. 10.2, б). В другом случае валик при помощи универсального шарнира, лежащего на оси вращения колонки, крепится к валу, на котором установ-. лен рычаг, соединенный с проводкой, идущей к органам поперечного управления (см. рис. Д0.2, в). В некоторых колонках на Валу внутри головки закрепляется коническая шестерня, которая передает усилия со штурвала через другую шестерню на вертикальный вал и затем на проводку управления (см. рис. 10.2, г). V Вертикальная труба соединяется с головкой и основанием при помощи заклепок и болтов. Колонка поворачивается относительно оси, закрепленной на основании. Ось устанавливается в подшипниках, запрессованных в прикрепленные к конструкции фюзеляжа кронштейньк К основанию прикреплен рычаг, соединенный с проводкой, идущей к органам продольного управления. Конструкщвное оформление штурвальных колонок весьма многообразно. Конструкция одной из них показана на рис. 10.23. КОНСТРУКЦИЯ КОМАНДНЫХ РЫЧАГОВ НОЖНОГО УПРАВЛЕНИЯ Несмотря на конструктивное многообразие постов ножного управления, в конструкции цх элементов есть много общего. Во всех постах педали должны иметь возможность регулировки под рост пилота. Наибольшее распространение получили следующие два способа регулировки. При дервом способе подножка педали закрепляется на элементе, который имеет возможность перемещаться в направляющей. Необходимое положение подножки фиксируется стопором (рис. 10.24). Этот способ регулировки применяется чаще всего в параллелогрммных механизмах и механизмах со скользящими педалями. Второй способ регулировки, применяемый чаще всего в, механизмах с качающимися педалями, осуществляется поворотом рамок педалей относительно секторов, связанных с проводкой - управления. Положение педалей здесь также фиксируется при помощи стопоров (рис. 10.25). Регулировка педалей под рост пилота производится, как правило, на земле. Но на само- Рис. 10.24- Пост ножного управления с па- раллелограммным механизмом: / - педаль ; 2 - ремень; 3 - шток регулировки педали; 4, 5 ~ трубы параллело-Траммного механизма; 6 - ограничитель отклонения пейалей; 7 - стопор регули-рсдаки педалей; 8 - тяга управления ру-, лем направления; Р - кронштейн 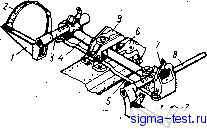
|
|
© 2010 www.sigma-test.ru Санкт-Петербург: +7 (812) 265-34-48, +7 (812) 567-94-10
Разработка и поддержка сайта: +7(495)795-01-39 после гудка 148651, sigma-test.ru(my_love_dog)r01-service.ru Копирование текстовой и графической информации разрешено при наличии ссылки. |


